热门关键字:
| 电路设计 单片机学习 PCB设计 电子制作 电工基础 电路基础 电子电路图 电脑技术 维修教程 手机数码 家电维修 电力技术 电气技术 |
| 电子基础 arm嵌入式 集成电路 模拟电子 电源管理 显示光电 楼宇控制 安防监控 控制电路 音响功放 单元电路 电子下载 维修资料下载 |
2 锁相环原理
“锁相”就是相位同步的自动控制。能够完成两个电信号相位同步的自动控制闭环系统叫做锁相环。锁相环广泛应用于广播通信、频率合成、自动控制及时钟同步等技术领域。
锁相环(Phase-Locked Loop,简称PLL)主要是由鉴相器(Phase Detector,简称PD)、压控振荡器(Voltage ControlledOsillator简称VCO)、环路滤波器(Loop Filter,简称LF)3部分组成。PD为相位比较装置,用于比较输入信号Ui(t)与VCO的输出信号Uo(t)的相位,产生对应于两个相位差信号的误差电压Ue(t)。LF用于滤除Ue(t)中的高频成分和噪声,以保证环路所要求的性能,增加系统的稳定性。压控振荡器受控制电压Ud(t)的控制,用于将LF的频率向输入信号的频率靠拢,直至消除频差而锁定。
PLL的工作原理是:比较Ui(t)与Uo(t)之间的相位差,产生Ue(t)调整VCO的频率,以达到与Ui(t)同频。在环路开始工作时,如果输入信号频率fi与压控振荡器频率fVCO不同,则因fi与fVCO之间存在固有频率差,而使相位差一直变化,导致PD输出的误差电压UPD在一定范围内变化。在该误差电压的控制下,fVCO也发生变化。若fVCO能够与fi相等,则在满足稳定性条件下应稳定在该频率,稳定后,fUi(t)-fUo(t)=0,相位差不随时间变化,且Ue(t)为固定值,这时环路就进入锁定状态。
3 系统设计
利用现有的技术设计传感电路,用于初步探测车辆。而检测电路把传感电路的输出信号转变为可直接显示或测量的电信号,以便系统进一步处理。这部分设计采用锁相环技术实现。
3.1 传感电路
图1给出正弦波振荡电路。它为电容三点式电路,也即考毕兹振荡电路。传感电路用于感应出金属物体的存在。设计中采用已实际应用的涡流传感方法,将埋入地下的探测线圈直接接入正弦振荡电路,即振荡电路输出的频率带有传感信号。
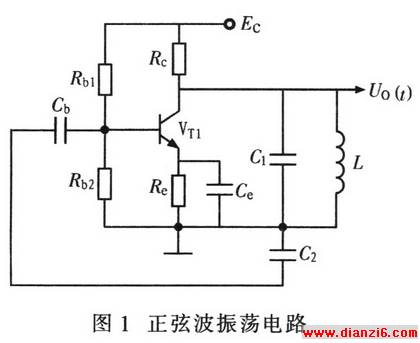
图1电路中:Rbl=Rb2=62 kΩ;Rc=1 kΩ;Re=2.2 kΩ;Ce=Cb=10μF;C1=C2=0.1μF;L为电感线圈,此时晶体管VT1为共射放大组态,工作在放大状态。
系统正常状态下即无车经过时,传感振荡电路的输出信号us(t)为频率保持不变(f=f0)的正弦波。当有车经过时,us(t)的频率变大,即f=f',其频率差为△f=f'-f0,范围大概在几百赫兹到几千赫兹。该电路的振荡频率f为:

由式(1)可见,f与电路中电感L、电容C1,C2有关(C1,C2为固定值),所以f为L的单值函数,当L发生变化时,该振荡电路的振荡频率也发生反方向变化。把地线圈作为L,直接连接到电路中,通过检测电路振荡频率的变化来反映L的变化,从而实现对金属物体的探测。
设正常状态下即无车经过时的输出信号频率为f0,有车经过时的振荡频率为f’,则易获知:f’>f0。由于f’不易通过固定公式直接计算,而只能通过实验法大概估算,而且实际应用中无需知道f’的具体数值,只需估计△f=f’-f0的范围即可。
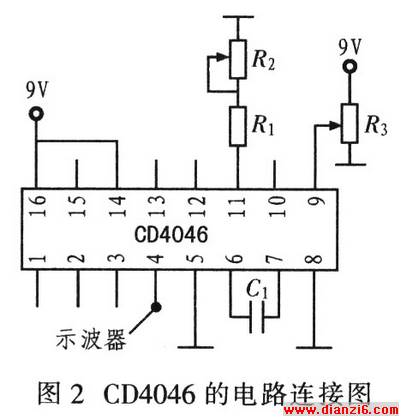
按照图2所示,调节可变电阻R3,使得引脚9的电压U9=Ucc/2=4.5 V,此时引脚4的输出频率即为PLL的中心频率。选取C1=1 000 pF,R1=5.1 kΩ,R2=10 kΩ,此时中心频率f0=23.7 kHz,刚好满足系统要求。
3.2.2 确定建立锁定时间
根据锁相环CD4046的工作原理,建立锁定时间则由引脚13(或引脚2)与引脚9之间的积分电阻电容决定。引脚13的输出通过积分电容C2充放电,使得U9发生变化,从而调节VCO的输出,即引脚4的输出频率。
4 实验及其结果分析
为了验证设计的可行性,在实验室做了验证试验。车辆和线圈都按相同比例缩小。采用直径为5 mm的普通,电线绕了100 cmx2 cm的线圈(匝数n=16),用于模拟实际应用的地线圈;再用一块20 cmxl0 cm的矩形金属板模拟实际的车辆。实验证明,正常状态下的输出频率f0=23.7 kHz,有车经过时的最大输出频率(将金属板完全放在线圈上时所测得值)为fmax=24.5 kHz,因此△fmax=0.8 kHz。
改变金属板到线圈的垂直距离,测量金属板移动到线圈上方后PLL的输出频率。实验结果表明,金属板距离线圈越近,PLL的输出频率越大。利用示波器观察PLL从失锁到锁定的状态发现,在金属板距离线圈2~15 cm时,均能观察到明显的从失锁到锁定的变化。当金属板长时间静止于线圈上时,PLL也均能恢复锁定状态。金属板到线圈的垂直距离,对应于实用中车辆底盘到地下线圈的距离,按相应比例看,实验所能测量的范围完全能满足实用的需要。因为实验是通过观察示波器判定PLL失锁的,为了效果明显,则设定的锁定时间较长。实用中可采用其他方式检测PLL失锁,以判定有车经过,可调整相应的电路参数,使锁定时间变得更短,探测灵敏度也会相应提高。实验证明,利用PLL实现的探测灵敏度完全达到系统要求。
5 结语
采用锁相环技术实现的车辆检测技术比现行采用单片机计数的车辆检测技术可靠性更高,而且通过检测锁相环失锁判定是否有车量经过,是以相对的频率变化而非绝对的频率变化进行判断,因此具有自我调节能力,不会因为周围电磁环境的改变导致中心频率偏移而失效。因此本文提出的锁相环技术在提高灵敏度方面确有明显效果,而且成本低,具有广泛的应用前景。
 温馨提示; 本站的资料全部免费下载,为方便下次找到本站记得将本站加入收藏夹哦,牢记网址http://www.dianzi6.com
温馨提示; 本站的资料全部免费下载,为方便下次找到本站记得将本站加入收藏夹哦,牢记网址http://www.dianzi6.com|
此页提供基于锁相环技术的高灵敏车辆探测电子小制作, 维修教程知识 - 电子制作参考。本站还有更多的电子制作相关资料分享。
Copyright© www.dianzi6.com Inc. All rights reserved 。 1 2 3 4 5 6 7 8 |
|