ШШУХЙиМќзжЃК
ЁЁЁЁеЊвЊЃКБОЮФНщЩмЕФЪЧвЛжжЛљгкЯпеѓCCDЕФЭМЯёКЭЮЛжУДЋИаЯЕЭГЁЃДЫЯЕЭГвдC18051F020аЭЮЂПижЦЦїзїЮЊЯТЮЛЛњЃЌНјааCCDЕФЧ§ЖЏКЭгыМЦЫуЛњ(ЩЯЮЛЛњ)ЕФЭЈбЖЕШЃЛМЦЫуЛњЭЈЙ§гУLabviewБраДЕФШЫЛњНЛЛЅШэМўПижЦећИіЯЕЭГЕФдЫааЃЛЩЯЮЛЛњКЭЯТЮЛЛњжЎМфвдRS232НгПкЭЈбЖЁЃОВтЪдЃЌБОЯЕЭГНјааИЩЩцЁЂбмЩфЕШвЛЮЌЙтбЇЪЕбщЪеЕНСМКУаЇЙћЃЛЮЛжУДЋИаЦїЕФЖЈЮЛеГЖШДя140ІЬmЃЌЖЈЮЛЦЕТЪДя50HzвдЩЯЁЃ
ЁЁЁЁ0 ЯЕЭГИХЪі
ЁЁЁЁБОЯЕЭГдРэШчЭМlЫљЪОЃЌМЦЫуЛњЭЈЙ§RS232НгПкКЭC8051ЮЂПижЦЦїНјааЭЈбЖЃЌПижЦећИіЯЕЭГЕФдЫааЃЛC8051ЮЂПижЦЦїПижЦCCDНјааЙтаХКХЕФВЩМЏЃЌЭЌЪБНЋВЩМЏЕФЪ§ОнДЋЪфжСМЦЫуЛњЃЛгІгУLabviewБраДЕФШЫЛњНЛЛЅШэМўПЩвдШЋздЖЏЕиВйзїећИіЯЕЭГЃЌВЂЖдВЩМЏЕФЪ§ОнНјааЗжЮіЁЂДІРэКЭвЛЮЌФЃФтГЩЯёЁЃ
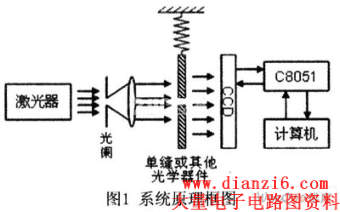
ЁЁЁЁЦНааЙтЭЈЙ§ЕЅЗьЕШЙтбЇдЊМўЪБЃЌЛсАДеевЛЖЈЕФЙтбЇЙцТЩЗжВМЃЌЯпеѓCCDдђФмЙЛНЋвЛЮЌЕФЙтаХКХзЊЛЏЮЊФЃФтЕчаХКХЃЌдйЭЈЙ§вЛЯЕСаЕФЕчаХКХДІРэЃЌОЭФмЙЛдкМЦЫуЛњЩЯЯдЪОЙтЧПЕФЗжВМЁЃЭЌЪБЃЌШчЙћжаМфЕФЙтбЇЦїМўЪЧвЛИіЕЅЗьЃЌдђЗьЕФжааФЕуЖдгІЕФЪЧЙтЧПЕФзюДѓжЕЃЌЭЈЙ§етИідРэФмЙЛБъМЧЦїМўЕФЮЛжУаХЯЂ(ШчЭМ1)ЁЃБОЯЕЭГЖдЕЏЛЩеёСЫКЭЕЅАкЕШЖЏСІбЇЯЕЭГНјааСЫВтЪдЃЌЛёЕУСЫЗЧГЃКУЕФаЇРлЁЃ
ЁЁЁЁ1 гВМўЩшМЦ
ЁЁЁЁБОЯЕЭГЕФгВМўЩшМЦжївЊАќРЈCCDЕФЧ§ЖЏКЭаХКХВЩМЏЁЃЙтЕчаХКХзЊЛЛЦїМўбЁгУЕФЪЧTCDl200DаЭCCDЃЌЦфЧ§ЖЏашвЊЗЂЫЭSHЁЂІе1ЁЂІе2ЁЂRSЕШ4ИіЧ§ЖЏТіГхЃЌЦфжаRSЕФЦЕТЪ(гыAЃЏDзЊЛЛашвЊЕФЦЕТЪЯрЭЌ)ЗЖЮЇЪЧ0ЃЎ02MHzЕН2MHzЃЌЕфаЭжЕЪЧ1MHzЁЃЖјC8051F020ЕФPCAФЃПщзюИпПЩЗЂЫЭ11MHzЕФТіГхЃЌADCЕФЙЄзїЦЕТЪДя500kspsЃЌЭъШЋПЩвдЕЃШЮЧ§ЖЏCCDЕФЙЄзїЁЃБОЪЕбщжаRSКЭAЃЏDзЊЛЛЕФЦЕТЪЮЊ40KHzЁЃ
ЁЁЁЁОпЬхЗНАИШчЭМ2ЫљЪОЃЌгУPCAЗЂЫЭЮШЖЈЕФ0ЃЎ8MHzЕФЗНВЈТіГхЃЌШЛКѓЭЈЙ§DДЅЗЂЦїЃЌНјаа2ДЮЗжЦЕЃЌЛёЕУ5VЃЌ0ЃЎ4MHzКЭ0ЃЎ2MHzЕФЗНВЈТіГх(СНжжЦЕТЪЖМИїгаСНТЗЕчЦНзмЪЧЯрЗДЕФТіГх)ЃЌЦфжа0ЃЎ4MHzТіГхзїЮЊRSЧ§ЖЏТіГхЃЌ0ЃЎ2MHzЕФСНТЗТіГхЗжБ№зїЮЊІеlКЭІе2ЕФТіГхЁЃЭЌЪБгУЖЈЪБЦї2(T2)МьВтRSЃЌНјааМЦЪ§ЃЌШЗЖЈSHЕФжмЦкЃЌЗЂЫЭЗћКЯвЊЧѓЕФSHТіГхЁЃ

ЁЁЁЁЖдгкDOSЕФВЩМЏЃЌБОЯЕЭГбЁгУЕФЪЧгУOP27ДюНЈЕФМѕЗЈЦїЕШФЃФтЕчТЗНјааЗХДѓЁЂТЫВЈЕШдЄДІРэЁЃ
ЁЁЁЁ2 ШэМўЩшМЦ
ЁЁЁЁБОЯЕЭГЕФШэМўЩшМЦАќРЈC8051ЮЂПижЦЦїЕФгІгУГЬађКЭШЫЛњНЛЛЅНчУцЕФLabviewгІгУГЬађЁЃ
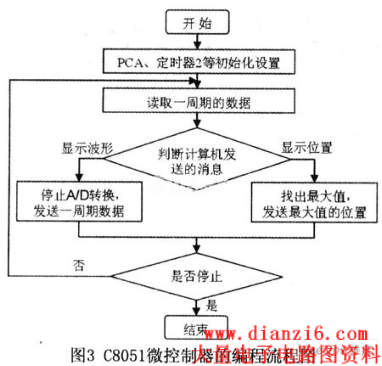
ЁЁЁЁC805lЮЂПижЦЦїЕФГЬађСїГЬЭМШчЭМ3ЫљЪОЃЌХфКЯгВМўЩшжУКУPCAЁЂADCЕШЙІФмЕФГѕЪМЛЏКѓЃЌжБжСНгЪеМЦЫуЛњЗЂЫЭЕФаХЯЂЃЌБуПЊЪМЖСШЁCCDЕФЪ§ОнЃЌВЂДцДЂЕНXDATAПеМфЕБжаЁЃНсЪјвЛжмЦкЕФЪ§ОнЕФВЩМЏдђЙиБеAЃЏDзЊЛЛЃЌВЂХаЖЯМЦЫуЛњЗЂЫЭЕФаХЯЂРявЊЧѓЗЂЫЭећИіВЈаЮЛЙЪЧНјааЮЛжУХаЖЯЃЌШєЪЧЧАепЃЌдђНЋЫљгаЕФЪ§ОнЗЂЫЭЕНДЎПкЕФЛКДцжаЃЛШєЪЧКѓепЃЌдђХаЖЯГізЊЛЛЪ§ОнЕФзюДѓжЕЃЌдйНЋзюДѓжЕЕФЮЛжУаХЯЂЗЂЫЭжСДЎПкЃЌНјааЭъвЛЯЕСаЕФЙ§ГЬКѓЃЌдђжиаТПЊЪМВЩМЏЃЌвРДЫбЛЗЁЃ
ЁЁЁЁLabviewВЩгУЭМаЮЛЏЕФGгябдНјааБрГЬЃЌЭъГЩШЫЛњНЛЛЅНчУцШэМўЕФЙІФмЁЃИУШэМўПЩвдЪЕЯжећИіВЈаЮЭМКЭЮЛжУаХЯЂЕФЪЕЪБВЩМЏЃЌРњЪЗЪ§ОнЕФБЃДцКЭЖСШЁЃЌвдМАећИіЯЕЭГЕФПЊЪМЁЂЭЃжЙКЭИДЮЛЕШПижЦЁЃ

ЁЁЁЁ3 ВтЪдНсЙћ
ЁЁЁЁЯЕЭГЭъГЩКѓЃЌЮвУЧНјааСЫЕЅЗьбмЩфКЭзшФсеёЖЏЕФВтЪдЪЕбщЁЃЪЕбщНсЙћШчЭМ5ЁЂЭМ6ЫљЪОЃЌЦфжаЭМ5ЪЧЕЅЗьбмЩфЕФВтЪдЭМбљЃЌИУЭМЧхЮњЕиЗДгГГіСЫЕЅЗьбмЩфЕФЙцТЩЃЌЭъећЕиЯдЪОСЫбмЩфЬѕЮЦИїМЖЬѕЮЦЕФМфОрКЭЯрЖдЙтЧПжЕЃЌВЈаЮЭМЯТЗНЕФЭМбљдђЪЧЖдЪЕМЪЬѕЮЦЧщПіЕФФЃФтЃЌЪЙНсЙћИќМгМђНрЁЂжБЙлЃЛЭМ6ЪЧзшФсеёЖЏЕФВтЪдЭМбљЃЌЭМжаЭЌбљЧхЮњЕиеЙЪОСЫзшФсеёЖЏЕФЮяРэЙцТЩЃЌОЙ§ВтЪдЃЌИУЯЕЭГЖЈЮЛОЋЖШДя140 ІЬmЃЌЖЈЮЛЦЕТЪДя50HzвдЩЯЁЃ

ЁЁЁЁБОЯЕЭГРћгУC8051f020аЭЮЂПижЦЦїДДаТСЫвЛжжаТаЭЕФCCDЧ§ЖЏЗНЪНЃЌЭЌЪБгыLabviewащФтвЧЦїЯрНсКЯЃЌПЩвдКмКУЕФВтСПвЛЮЌЙтЧПЕФБфЛЏЃЌВЂПЩвдЖдЪ§ОнНјааЕЅИіЬсШЁКЭЗжЮі(ШчБОЮФЕФЮЛжУДЋИаЕШ)ЃЌЪЪгУгкЪЕбщНЬбЇЁЂПЦбЇбаОПКЭЩњВњЕШаэЖрСьгђЁЃ
 ЮТмАЬсЪО; БОеОЕФзЪСЯШЋВПУтЗбЯТдиЃЌЮЊЗНБуЯТДЮевЕНБОеОМЧЕУНЋБОеОМгШыЪеВиМаХЖЃЌРЮМЧЭјжЗhttp://www.dianzi6.com
ЮТмАЬсЪО; БОеОЕФзЪСЯШЋВПУтЗбЯТдиЃЌЮЊЗНБуЯТДЮевЕНБОеОМЧЕУНЋБОеОМгШыЪеВиМаХЖЃЌРЮМЧЭјжЗhttp://www.dianzi6.com|
ДЫвГЬсЙЉЛљгкЯпеѓCCDЕФЭМЯёКЭЮЛжУДЋИаЯЕЭГДЋИаММЪѕжЊЪЖ,ДЋИаЦїгыМьВтММЪѕ,ДЋИаЦїММЪѕ,ЙтЯЫДЋИаММЪѕ, ДЋИаММЪѕВЮПМЁЃБОеОЛЙгаИќЖрЕФДЋИаММЪѕЯрЙизЪСЯЗжЯэЁЃ
Copyright© www.dianzi6.com Inc. All rights reserved ЁЃ 1 2 3 4 5 6 7 8 |
|