ШШУХЙиМќзжЃК
ЁЁЁЁеЊ вЊЃКНщЩмСЫдкНЛЛЅЪНCгябдПЊЗЂЦНЬЈLabWindows/ CVI ЯТЃЌРћгУOpenGL ЭМаЮЯЕЭГЕФЙІФмРДЩшжУLabWindows/ CVI гыOpenGL ЕФЭМаЮНгПкЁЂНЈСЂOpenGL ЙтееЁЂЪгЭМКЭфжШОУшЪіБэМАРћгУOpenGLЛљБОЭМдЊНЈСЂСљздгЩЖШЛњЦїЪжЕФШ§ЮЌФЃаЭЕФаТЗНЗЈЃЌВЂЧвРћгУOpenGLЕФЫЋЛКДцММЪѕЪЕЯжСЫЗТецЯЕЭГЕФНЛЛЅЪННчУцЁЃдкДЫПЊЗХЕФЗТецЯЕЭГЯТЃЌПЩжБЙлЁЂе§ШЗЕиФЃФтЛњЦїЪжЕФдЫЖЏЧщПіЃЌЛЙФмЗНБуЕиНјааЛњЦїЪждЫЖЏЙьМЃЕФЗТецбаОПЁЃ
ЁЁЁЁЛњЦїЪжШ§ЮЌНЈФЃЗТецЪЧЛњЦїШЫИїЯюЗТецжаЕФвЛИіживЊзщГЩВПЗжЃЌЖдгкЛњЦїЪжЕФдЫЖЏЙьМЃЗТецгаживЊЕФжИЕМвтвхЁЃLabWindows/ CVI(вдЯТМђГЦCVI) ЪЧУРЙњNI ЙЋЫОЭЦГіЕФНЛЛЅЪНC гябдПЊЗЂЦНЬЈЁЃЦфМЏГЩЛЏПЊЗЂЛЗОГЁЂНЛЛЅЪНБрГЬЗНЗЈЁЂКЏЪ§УцАхКЭЗсИЛЕФПтКЏЪ§ДѓДѓдіЧПСЫгябдЕФЙІФмЃЌЮЊЪьЯЄC гябдЕФПЊЗЂШЫдБЬсЙЉСЫвЛИіРэЯыЕФШэМўПЊЗЂЦНЬЈ[1]ЁЃгЩгкдкCVI жавбОМЏГЩСЫOpenGL ЭМаЮБъзМЃЌВЂЧвOpenGLБрГЬРрЫЦгкC БрГЬЃЌЪЕМЪНгПкОЭЪЧCЃЌЯрЖдЛљгкVisual C++ЛљДЁРрПтMFC КЭOpenGL ПЊЗЂЕФШ§ЮЌЗТецЦНЬЈЃЌдкCVI жаРћгУПЩЪгЛЏММЪѕЃЌПЊЗЂЛљгкOpenGL ЕФШ§ЮЌЭМаЮИќЗНБуПьНнЃЌЭЌЪБПЩдкДЫШ§ЮЌФЃаЭЦНЬЈЩЯЗНБуЕиНјааЙьМЃЙцЛЎКЭПижЦЫуЗЈЕШЗНУцЕФЗТецбаОПЁЃ
ЁЁЁЁ1 OpenGLЕФМђНщКЭЛљБОВйзїЙ§ГЬ
ЁЁЁЁ1.1 OpenGLМђНщ
ЁЁЁЁOpenGLЭМаЮЯЕЭГЪЧЭМаЮгВМўЕФвЛжжШэМўНгПкЁЃOpenGLЪЧSGIЙЋЫОПЊЗЂЕФПЊЗХЪНШ§ЮЌЭМаЮБъзМЃЌЫќЪЕжЪЩЯОЭЪЧвЛИіШ§ЮЌЭМаЮКЭФЃаЭПтЃЌОпгаИпЖШЕФПЩвЦжВадЃЌПЩвддкЖржжВйзїЯЕЭГЦНЬЈЩЯдЫааЃЌР§ШчИїжжАцБОЕФWindowsЁЂUnix/ Linux КЭMac OSЕШЃЌОпгаЗЧГЃПьЕФфжШОЫйЖШЁЃЫќПЩвдЖдМЦЫуЛњЭМаЮММЪѕНјааПижЦЃЌВњЩњБЦецЕФЭМЯёЛђепащЙЙГіЯжЪЕЪРНчУЛгаЕФЭМЯёЃЌЪЧИпадФмЭМаЮКЭНЛЛЅЪНГЁОАДІРэЕФЙЄвЕБъзМ[2]ЁЃOpenGL ЪЧвЛжжИпадФмЕФПЊЗХЪНЭМаЮПтЃЌЫќЕФЭМаЮAPIвдКЏЪ§аЮЪНЬсЙЉСЫ115ИіКЫаФПтКЏЪ§ЁЂ43ИіЪЕгУПтКЏЪ§GLUЁЂ31ИіБрГЬИЈжњПтКЏЪ§GLAUXвдМАШєИЩИіX-Windows/MS-WindowsзЈгУПтКЏЪ§GLX/WGLЁЃOpenGLЬсЙЉСЫЖржжШ§ЮЌЭМаЮЕФЛцжЦЗНЗЈЃЌАќРЈЯпПђЛцжЦЗНЪНЁЂЩюЖШгХЯШЗНЪНЁЂЗДзпбљЗНЪНЁЂЦНУцУїАЕДІРэЗНЪНЁЂЙтЛЌУїАЕДІРэЗНЪНЁЂвѕгАКЭЮЦРэЗНЪНЁЂдЫЖЏФЃК§ЗНЪНЁЂДѓЦјЛЗОГаЇЙћЁЂЩюЖШгђаЇЙћ[3]ЁЃOpenGLЕФетаЉЙІФмПЩвдЪЕЯжБЦецЕФШ§ЮЌЛцжЦаЇЙћЃЌДДНЈНЛЛЅадШ§ЮЌГЁОАКЭЪгОАЖЏЛЁЃ
ЁЁЁЁ1.2 OpenGLЕФЛљБОВйзїЙ§ГЬ
ЁЁЁЁOpenGLЖдШ§ЮЌЭМаЮВйзїПЩвдЙщФЩЮЊЃКГЁОАУшЪіЁЂЩшжУЙтееЁЂЙлВьГЁОАЁЂЙтеЄЛЏЃЌетИіЙ§ГЬгыШЫУЧЙлВьЪРНчЕФЙ§ГЬЪЧвЛжТЕФЃЌЦфОпЬхВйзїВНжшШчЯТЃК
ЁЁЁЁ(1) ИљОнЛљБОЭМаЮНЈСЂОАЮяФЃаЭЃЌВЂЖдЫљНЈСЂЕФФЃаЭНјааЪ§бЇУшЪіЃЛ
ЁЁЁЁ(2)АбОАЮяФЃаЭЗХдкШ§ЮЌПеМфжаКЯЪЪЕФЮЛжУЃЌВЂЩшжУЪгЕуЃЈViewpointЃЉЃЌвдЙлВьГЁОАЃЛ
ЁЁЁЁ(3) МЦЫуФЃаЭжаЫљгаЮяЬхЕФЩЋВЪЃЌЭЌЪБШЗЖЈЙтееЬѕМўЁЂЮЦРэгГЩфЗНЪНЕШЃЛ
ЁЁЁЁ(4) АбОАЮяФЃаЭЕФЪ§бЇУшЪіМАЦфЩЋВЪаХЯЂзЊЛЏжСЦСФЛЩЯЕФЯёЫиЃЌМДЙтеЄЛЏЃЈRasterizationЃЉЁЃдкетаЉВНжшЕФжДааЙ§ГЬжаЃЌOpenGL ЛЙПЩФмжДааЦфЫћВйзїЃЌШчЭМ1ЫљЪОЁЃ
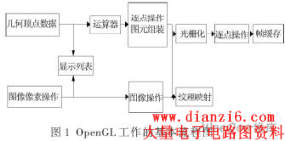
ЁЁЁЁГЬађДгЭМ1ЕФзѓВрНјШыЃЌОЙ§вЛЯЕСаЕФдЫЫуДІРэЃЌНЋМИКЮЖЅЕуЪ§ОнКЭЭМЯёЯёЫиЪ§ОнМгЙЄКѓЩњГЩД§ЯдЪОЕФжЁЁЃСэЭтЃЌОАЮяЙтеЄЛЏжЎКѓБЛЫЭШыжЁЛКДцЧАЃЌЛЙПЩвдИљОнашвЊЖдЯёЫиНјааВйзїЁЃ
ЁЁЁЁ2 дкLabWindows/CVIжаХфжУOpenGL
ЁЁЁЁдкCVIПЊЗЂЛЗОГжаЪЙгУOpenGLПЊЗЂШ§ЮЌЗТецЭМаЮЕФЙиМќЪЧШчКЮХфжУCVIКЭOpenGLЕФЭМаЮНгПкЁЃ
ЁЁЁЁ2.1 ЬэМггыOpenGLЯрЙиЕФЭЗЮФМўКЭПтЮФМў
ЁЁЁЁдкCVIЯТДДНЈвЛИіаТЕФЙЄГЬЮФМўЃКOGLHand.prjЃЌдкOGLHand.cЮФМўЪзВПЬэМг4ИіЭЗЮФМўЃК
ЁЁЁЁ#include
ЁЁЁЁ#include//ЛљБОПт
ЁЁЁЁ#include//ЪЕгУПт
ЁЁЁЁ#include//ИЈжњПт
ЁЁЁЁдкCVIБрМЦїЕФжїВЫЕЅЁАeditЁБжабЁШЁЁАAdd Files to ProjectЁБЯТЕФЁАLibraryЁБЃЌдкЕЏГіЕФЖдЛАПђРябЁШЁCVIsdklibжаЕФ3ИіПтЮФМўЃКglu32.libЁЂglaux.libКЭopengl32.libВЂЬэМгЕНЕБЧАЙЄГЬжаЁЃ
ЁЁЁЁ2.2 ЩшжУCVIгыOpenGLЭМаЮНгПк
ЁЁЁЁЫфШЛOpenGLвбОФкЧЖдкCVIжаЃЌЕЋЪЧвЊШУCVIПиМўЯдЪОOpenGLЭМаЮЃЌБиаыАбCVIЕФpictureПиМўзЊЛЛГЩOpenGLПиМўЁЃашвЊдкЙЄГЬжаЬэМгКЏЪ§cviogl.fpЃЌЦфТЗОЖЮЊЃКCVItoolslibcustctrlЁЃВЂдкOGLHand.cЮФМўЪзВПЬэМгЃК#include'cviogl.h'ЁЃ
ЁЁЁЁдкжїКЏЪ§main()РяЕїгУКЏЪ§НЋCVIЕФpictureПиМўзЊЛЛГЩOpenGLПиМўВЂЗЕЛиПиМўОфБњOGLCtrlЃЌдйЕїгУInitControl()КЏЪ§ГѕЪМЛЏOpenGLЪєадЃЌзюКѓЕїгУint OGLRefreshGraph(int Panel_Handle,int OGL_Control_Id)КЏЪ§МАЪБИќаТOpenGLПиМўЭМаЮЕФГЁОАКЭЭМаЮЪєадЁЃ
ЁЁЁЁ3 ЛљгкLabWindows/CVIКЭOpenGLЕФЛњЦїЪжШ§ЮЌНЈФЃ
ЁЁЁЁ3.1НЈСЂOpenGLЙтееЁЂЪгЭММАЭИЪгФЃЪН
ЁЁЁЁЪгЭМОіЖЈФЃаЭдкГЁОАжаЕФЮЛжУЃЌЭЌЪБвЊбЁдёвЛИігаРћЕФЙлВьЕуРДЙлВьГЁОАЁЃЭЈЙ§ЖЈвхЙтееЁЂЪгЭММАЭИЪгФЃЪНОЭФмдкЖўЮЌЦСФЛЩЯЯдЪОГіСЂЬхЕФШ§ЮЌЭМаЮЃЌетаЉЖМЗХдкInitControl()КЏЪ§жаЖЈвхЃЌАќРЈГѕЪМЛЏЯЕЭГЙтееКЭГѕЪМЛЏЪгЭМЮЛжУЁЃ
ЁЁЁЁ// ГѕЪМЛЏЯЕЭГЙтее
ЁЁЁЁOGLSetCtrlAttribute(hPanel,this->hControl,
ЁЁЁЁOGLATTR_LIGHTING_ENABLE, 1);
ЁЁЁЁOGLSetCtrlAttribute(hPanel, this->hControl,
ЁЁЁЁOGLATTR_LIGHT_SELECT, 1);
ЁЁЁЁOGLSetCtrlAttribute(hPanel, this->hControl,
ЁЁЁЁOGLATTR_LIGHT_ENABLE, 1);
ЁЁЁЁOGLSetCtrlAttribute(hPanel, this->hControl,
ЁЁЁЁOGLATTR_LIGHT_DISTANCE, 2.0);
ЁЁЁЁOGLSetCtrlAttribute(hPanel, this->hControl,
ЁЁЁЁOGLATTR_LIGHT_LATITUDE, 30.0);
ЁЁЁЁOGLSetCtrlAttribute(hPanel, this->hControl,
ЁЁЁЁOGLATTR_LIGHT_LONGITUDE, 150.0);
ЁЁЁЁ// ГѕЪМЛЏЯЕЭГЪгЭМЮЛжУ
ЁЁЁЁOGLSetCtrlAttribute(hPanel,this->hControl,
ЁЁЁЁGLATTR_PROJECTION_TYPE,OGLVAL_PERSPE CTIVE);
ЁЁЁЁOGLSetCtrlAttribute(hPanel, this->hControl,
ЁЁЁЁOGLATTR_VIEW_DIRECTION,OGLVAL_ USER_DEFINED);
ЁЁЁЁOGLSetCtrlAttribute(hPanel, this->hControl,
ЁЁЁЁOGLATTR_VIEW_CENTERX, 0.0);
ЁЁЁЁOGLSetCtrlAttribute(hPanel, this->hControl,
ЁЁЁЁOGLATTR_VIEW_CENTERY, 0.0);
ЁЁЁЁOGLSetCtrlAttribute(hPanel, this->hControl,
ЁЁЁЁOGLATTR_VIEW_CENTERZ, 1.0);
ЁЁЁЁ3.2 НЈСЂфжШОУшЪіБэ
ЁЁЁЁфжШОЭМЯёОЭЪЧМЦЫуЛњИљОнФЃаЭДДНЈЭМЯёЕФЙ§ГЬЃЌМДШ§ЮЌЭМаЮЕФЯдЪОЙ§ГЬЁЃвЊАбвЛИіЮяЬхЕФШ§ЮЌзјБъБфЛЛЮЊЦСФЛЩЯЕФЯёЫизјБъЃЌзюжеЪЙЭМаЮдкЦСФЛЩЯЯдЪОЁЃ
ЁЁЁЁOpenGLзјБъБфЛЛАќРЈЃКМИКЮБфЛЛЁЂЭЖгАБфЛЛЁЂМєШЁБфЛЛКЭЪгЧјБфЛЛЃЌШ§ЮЌЭМаЮЕФЯдЪОСїГЬШчЭМ2ЫљЪОЁЃ

ЁЁЁЁЪгЧјБфЛЛОиеѓЃКGLViewport(x,y,width,height)ЃЛЦфжаЃЌВЮЪ§x,yЪЧЪгЧјдкЦСФЛДАПкзјБъЯЕжаЕФзѓЩЯНЧзјБъЃЌwidthКЭheightЗжБ№ЮЊЪгЧјЕФИпЖШКЭПэЖШЁЃзЂвтБфЛЛжЛЖдЦфКѓЕФвЛЯЕСаВйзїВњЩњгАЯьЃЌШчдкДЫжЎЧАЦСФЛЩЯвбгаЭМаЮЃЌдђБфЛЛЖдЦфВЛВњЩњгАЯьЁЃБфЛЛКѓШчНЛЛЛЛКДцЃЌдђПЩаЮГЩЖЏЛЃЌЗёдђжЛдкЦНУцЩЯзїЭМЁЃ
ЁЁЁЁ3.3 НЈСЂСљздгЩЖШЛњЦїЪжФЃаЭ
ЁЁЁЁOpenGLЬсЙЉЖдЖўЮЌКЭШ§ЮЌЭМаЮЕФЛљБОВйзїЃЌЕЋЪЧВЂВЛЬсЙЉУшЪіИДдгМИКЮЮяЬхМАНЈСЂИДдгЮяЬхФЃаЭЕФЪжЖЮЃЌвђЖјБиаыбАевздЩэЕФШ§ЮЌНЈФЃЗНЗЈЁЃЖдВЛЬЋИДдгЕФФЃаЭжБНгРћгУOpenGLЕФЛљБОШ§ЮЌЭМдЊЃЈЕуЁЂЯпЁЂУцЃЉРДЙЙдьЃЌМШЗНБугжПьНнЃЌвзгкЖдФЃаЭНјааВйзїКЭПижЦЃЌШБЕуЪЧНЈФЃЕФСщЛюЖШВЛДѓЃЌВЛЙ§ЖдгкНЈдьБОЯЕЭГЕФШ§ЮЌФЃаЭвбзуЙЛ[4]ЁЃ
ЁЁЁЁЖдЪЕЮяНјаавЛЖЈМђЛЏКѓНЈСЂЕФФЃаЭЪЧгЩвЛаЉдВжљЬхЁЂГЄЗНЬхКЭЧђЬхзщКЯЖјГЩЁЃВЩгУЫГађУшЪіИїИізгЬхЕФЗНЗЈРДНЈСЂСљздгЩЖШЛњЦїЪжФЃаЭЁЃgluCylinder()гУРДЛцжЦвЛИіжаПеЕФЖўДЮжљУцзїЮЊЕззљЁЃgluDisk()гУРДЛцжЦвЛИіДЙжБгкZжсЕФдВХЬЁЃgluSphere()гУРДЛцжЦвЛИіЧђЬхзїЮЊЙиНкЁЃglRotatef()БэЪОАбЕБЧАОиеѓгывЛИіБэЪОа§зЊЕФЮяЬхЕФОиеѓЯрГЫЃЌвдФцЪБеыЕФЗНЯђШЦзХДгдЕуЕНФПБъЕуЕФжБЯпа§зЊЁЃВЮЪ§RotationжИЖЈСЫа§зЊЕФЖШЪ§ЁЃglTranslatef()АбЕБЧАОиеѓгывЛИіБэЪОвЦЖЏЮяЬхЕФОиеѓЯрГЫЃЌетИівЦЖЏОиеѓгЩКЏЪ§ЕФВЮЪ§жИЖЈЃЌОЙ§ЦНвЦЕФОиеѓГЩЮЊЕБЧАЕФБфЛЛОиеѓЁЃгЩгкдкOpenGLРяУшЪіЯТвЛИіЮяЬхЖМЪЧдкЧАвЛИіЮяЬхЕФЛљДЁЩЯЃЌвђДЫУПДЮЖМашвЊЖдаТзјБъжааФНјааЖЈЮЛЁЃР§ШчЕБДДНЈКУЛњЦїШЫЪжБлЕФЕквЛЖЮКѓЃЌЮЊСЫДДНЈЪжБлЕФЕкЖўЖЮЃЌашвЊЪЙгУКЏЪ§glTranslate()АбОжВПзјБъЯЕЭГвЦЖЏЕНЯТвЛИіНкЕуЁЃ
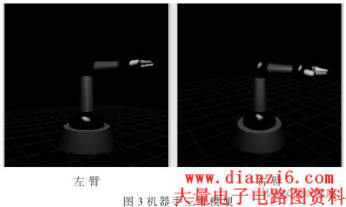
ЁЁЁЁФЃаЭЕФЙЙНЈЙ§ГЬВЩгУЗжВуНсЙЙЃЌМДдкЯргІЕФЙиНкзјБъЯЕжаЙЙНЈИїИіФЃПщЃЌетбљПЩвдЪЕЯжЖРСЂПижЦЃЌЪЙЦфФмЙЛШЦзХИїздЕФзјБъжса§зЊЁЃСНжЛЛњЦїЪжЕФШ§ЮЌЭМаЮШчЭМ3ЫљЪОЁЃ
ЁЁЁЁ3.4 ЛњЦїЪжПЩЪгЛЏЗТец
ЁЁЁЁЛњЦїШЫЗТецЕФбаОПвбОГЩЮЊЛњЦїШЫбЇжавЛИів§ШЫжѕФПЕФСьгђЃЌЖдгкбщжЄЛњЦїШЫЙЄзїдРэЁЂЙЄзїПеМфМАНјаадЫЖЏбЇбаОПЕШЖМОпгаЗЧГЃживЊЕФжИЕМвтвхЁЃЖјЛњЦїЪжзїЮЊЛњЦїШЫВЛПЩШБЩйЕФВПЗжЃЌЖдЦфНјааШ§ЮЌПЩЪгЛЏЗТецПЩвдЪЙбаОПепЖдЛњЦїШЫдЫЖЏЗНЪНгавЛИіИаадЕФШЯЪЖЃЌПЩвдАяжњбаОПШЫдБЖдЛњЦїШЫЩэЬхИїИіВПЗжЕФЮЛжУЙиЯЕНЈСЂе§ШЗЕФЗНГЬЃЌПЩгУгкМьбщЙьМЃЙцЛЎКЭзївЕЙцдђЕФе§ШЗадКЭКЯРэадЃЌПЩЮЊРыЯпБрГЬММЪѕЕФбаОПЬсЙЉвЛжжгааЇЕФбщжЄЪжЖЮЁЃЯдШЛЃЌВЩгУПЩЪгЛЏЗТецММЪѕЕФКУДІдкгкЃК
ЁЁЁЁЃЈ1)ДгЩЯЮЛЛњЕФЭМаЮЩЯОЭПЩвдПДЕНЛњЦїЪжЕФдЫЖЏЧщПіЃЌдіМгСЫЪгОѕаЇЙћЃЛ
ЁЁЁЁЃЈ2)ЖдгкЛњЦїЪждкЮЃЯеЛЗОГЛђепдЖОрРыЙЄзїЃЌЖјШЫгжЮоЗЈЕНДяЯжГЁЪБЃЌВЩгУДЫЯюММЪѕЕФвтвхЪЧУїЯдЕФЃЌЫќПЩвдБЃжЄШЫдкЩЯЮЛЛњЯЕЭГНјааЪЕЪБМрПиЛњЦїЪжЕФЙЄзїзДПіЃЌвдБуЗЂГіаТЕФПижЦжИСюЁЃ
ЁЁЁЁ3.4.1ЪЕЯжПижЦЛњЦїЪжЗТецНчУц
ЁЁЁЁдкЗТецНчУцЩЯЩшжУСЫЛњЦїЪжЕФЙлВьепЮЛжУЁЂМчЙиНкЁЂжтЙиНкЮЛжУБфЛЛа§ХЅЃЌвдМАЛњЦїЪжзІзгЕФЗжКЯбЁЯюЃЌзѓгвЪжПижЦбЁЯюЃЌОЕЭЗОрРыРНќЃЌЭЫГібЁЯюЁЃШчЭМ4ЫљЪОЁЃ

ЁЁЁЁ3.4.2 ЪЕЯжЛњЦїЪжЕФЖЏЛ
ЁЁЁЁЮЊСЫЪЕЯжЦНЛЌЕФЖЏЛаЇЙћЃЌOpenGLВЩгУЫЋЛКДцММЪѕЃЌЫЋЛКДцЪЧжИЮЛЦНУцБЛЗжЮЊЧАЬЈЛКДцЃЈЯдЪОЛКДцЃЉКЭКѓЬЈЛКДцЃЈФкДцЛКДцЃЉЁЃКѓЬЈЛКДцМЦЫуГЁОАЁЂЩњГЩЖЏЛЃЌЧАЬЈЛКДцЯдЪОКѓЬЈЛКДцвбОЛКУЕФЛУцЁЃЫљвджЛгаЧАЬЈЛКДцВХБЛЯдЪОЁЃ
ЁЁЁЁвђДЫЕБЭъећЕФЛУцдкКѓЬЈЛКДцжаЛГівдКѓЃЌОЭЕїгУSwapBuffers()КЏЪ§ЃЌЪЙЦфГЩЮЊЮЊЧАЬЈПЩМћЁЃетбљбЛЗЭљИДЃЌвўВиСЫЛЭМЕФЙ§ГЬЃЌЪгЦЕЭМЯёПЩвддкШЫблОѕВьВЛЕНЕФЪБМфМфИєНЛЬцГіЯжЃЌгкЪЧПДЦ№РДЫљгаЕФЛУцЖМЪЧСЌајЕФЁЃЫљвдЭЈЙ§ЗТецНчУцПЩвдПижЦЛњЦїЪжЕФдЫЖЏЙьМЃЁЃ
ЁЁЁЁРћгУCVI КЭOpenGLЕФНгПквдМАOpenGL дкШ§ЮЌЭМаЮжаЕФзПдНБэЯжЃЌНЈСЂСЫЛњЦїЪжЕФФЃаЭЃЌЩшМЦСЫЛљгкLabWindows/CVI КЭOpenGL ЕФСљздгЩЖШЛњЦїЪжШ§ЮЌЗТецЯЕЭГЃЌФмЙЛжБЙлЁЂе§ШЗЁЂПьНнЕиФЃФтЯжЪЕЛњЦїЪжЕФдЫЖЏЧщПіЁЃзїЮЊНјвЛВНЕФбаОПЃЌдкДЫЛљДЁЩЯЃЌПЩвдНјааЛњЦїЪжЪгОѕЕФЗТецбаОПЁЃ
 ЮТмАЬсЪО; БОеОЕФзЪСЯШЋВПУтЗбЯТдиЃЌЮЊЗНБуЯТДЮевЕНБОеОМЧЕУНЋБОеОМгШыЪеВиМаХЖЃЌРЮМЧЭјжЗhttp://www.dianzi6.com
ЮТмАЬсЪО; БОеОЕФзЪСЯШЋВПУтЗбЯТдиЃЌЮЊЗНБуЯТДЮевЕНБОеОМЧЕУНЋБОеОМгШыЪеВиМаХЖЃЌРЮМЧЭјжЗhttp://www.dianzi6.com|
ДЫвГЬсЙЉЛљгкOpenGLЕФСљздгЩЖШЛњЦїЪжНЈФЃЗТецedaММЪѕ,edaММЪѕЪЕгУНЬГЬ, EDA/PLDВЮПМЁЃБОеОЛЙгаИќЖрЕФEDA/PLDЯрЙизЪСЯЗжЯэЁЃ
Copyright© www.dianzi6.com Inc. All rights reserved ЁЃ 1 2 3 4 5 6 7 8 |
|